KITTI Multiview#
KITTI contains a suite of vision tasks built using an autonomous driving platform.
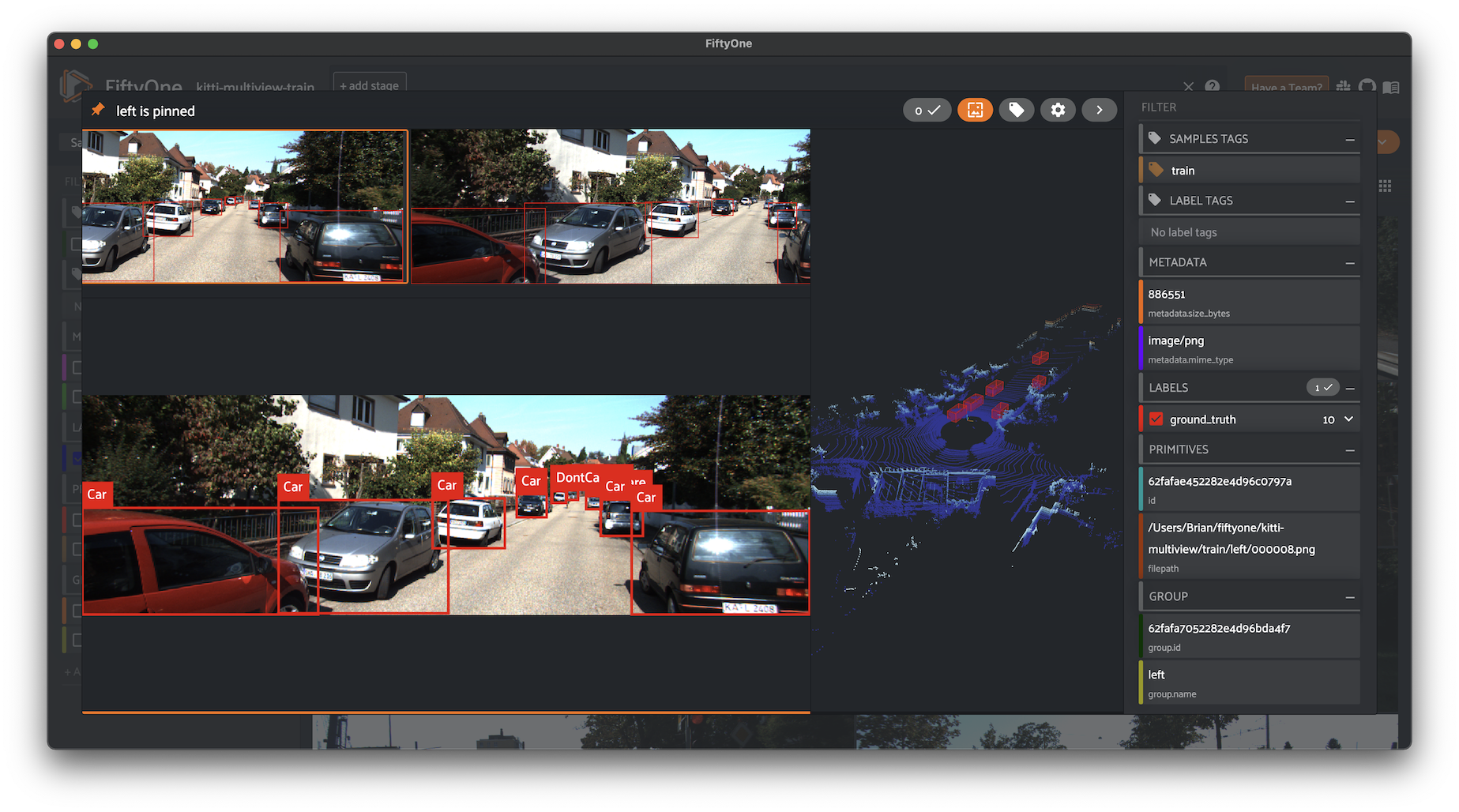
This dataset contains the following multiview data for each scene:
Left camera images annotated with 2D object detections
Right camera images annotated with 2D object detections
Velodyne LIDAR point clouds annotated with 3D object detections
The training split contains 7,481 annotated scenes, and the test split contains 7,518 unlabeled scenes.
A full description of the annotations can be found in the README of the object development kit on the KITTI homepage.
Details
Dataset name:
kitti-multiviewDataset source: http://www.cvlibs.net/datasets/kitti
Dataset license: CC-BY-NC-SA-3.0
Dataset size: 53.34 GB
Tags:
image, point-cloud, detectionSupported splits:
train, testZooDataset class:
KITTIMultiviewDataset
Example usage
1import fiftyone as fo
2import fiftyone.zoo as foz
3
4dataset = foz.load_zoo_dataset("kitti-multiview", split="train")
5
6session = fo.launch_app(dataset)
fiftyone zoo datasets load kitti-multiview --split train
fiftyone app launch kitti-multiview-train